
-
ЗНАКОМСТВО С TINKERCAD
-
ОСНОВЫ ЭЛЕКТРОНИКИ
-
ЗНАКОМСТВО С ARDUINO
Моторы вперед!
Электрический двигатель позволяет перевести электрическую энергию в механическую.
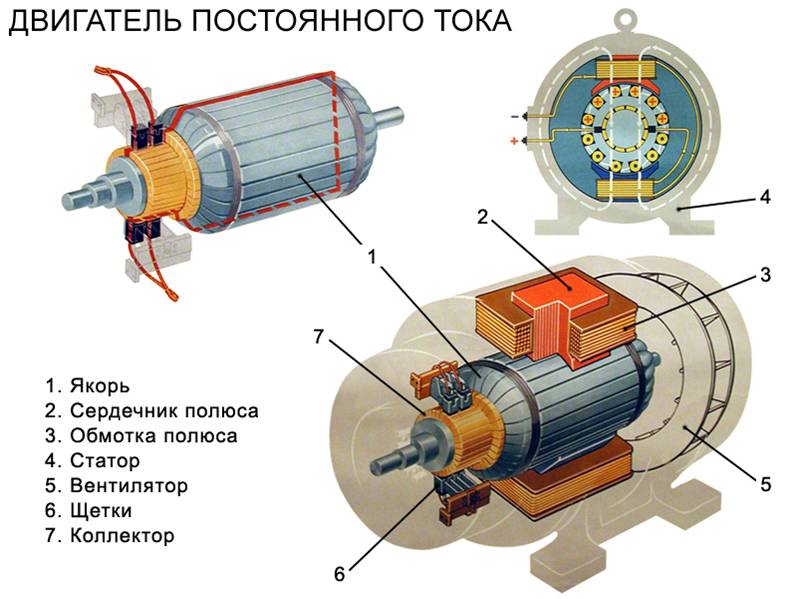
Устройство и принцип действия электродвигателя
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
Индуктор служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах – специальная обмотка, служащая для улучшения условий коммутации.
Якорь состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянного тока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусом электродвигателя.
В процессе работы электродвигателя постоянного тока щетки, скользя по поверхности вращающегося коллектора, последовательно переходят с одной коллекторной пластины на другую. При этом происходит переключение параллельных секций обмотки якоря и изменение тока в них. Изменение тока происходит в то время, когда виток обмотки замкнут щеткой накоротко. Этот процесс переключения и явления, связанные с ним, называются коммутацией.
Принципы управления двигателями постоянного тока с помощью Arduino
Часто в проектах Arduino необходимо управлять мощной нагрузкой (например, электродвигателем, лампой накаливания и т.п.). Выходы Arduino не могут обеспечить питание столь мощной нагрузки и большого напряжения. В таких случаях будем использовать дополнительный элемент – транзистор. Если от базы к эмиттеру будет протекать небольшой ток , то транзистор «откроется», ток потечет через транзистор и мотор начнет вращаться.
Двигатель имеет индуктивную составляющую, которая может генерировать большие всплески напряжения, опасные для транзистора. Использование в схеме диода гарантирует, что все паразитные возмущения от двигателя погасятся на нем, а не на транзисторе.
База транзистора очень чувствительна. Во избежание нежелательных шумов и непредсказуемого запуска двигателя желательным является использование подтягивающего резистора на базе транзистора. Он будет предохранять транзистор от случайного запуска.
Пример управления двигателем постоянного тока
В качестве примера, создадим устройство, позволяющее управлять работой мотора: мотор вращается в течение 5 секунд, затем выключается на 5 секунд, затем включается и т.д. Для этого:
- Зайдите в свое рабочее пространство TinkerCad.
- Создайте новое электронное устройство.
- На рабочее поле добавьте плату Arduino UNO, мотор, резистор, транзистор, диод и дополнительный источник питания. С помощью проводников создайте замкнутую электрическую цепь.

- Перейдите в режим написания программы в виде текстового кода и создайте следующую программу:
| Исходный код | Комментарии |
| int motorPin = 9; | Установить ножку базы транзистора в пин 9 |
| void setup() { | |
| pinMode(motorPin, OUTPUT); | Настраиваем пин 9 в режим вывода |
| } | |
| void loop(){ | |
| digitalWrite(motorPin, HIGH); | Подаем на пин 9 “высокий” сигнал, т.е. включаем мотор |
| delay(5000); | Пауза в 5 секунд |
| digitalWrite(motorPin, LOW); | Подаем на пин 9 “низкий” сигнал, т.е. выключаем мотор |
| delay(5000); | Пауза в 5 секунд |
| } |
- Запустив симуляцию, мы сможем убедиться в правильности нашего кода.
Управление скоростью мотора
Используя ШИМ, можно регулировать скорость вращения мотора. Например, если мы хотим установить скорость вращения мотора на 50%, то можно воспользоваться следующей командой:
| analogWrite(motorPin, 128); |
 |
Задания: |
Задание 16. Создайте виртуальное устройство, позволяющее плавно “разогнать” мотор до максимальной скорости, а затем плавно замедлить его.
Задание 17***. Создайте виртуальное устройство, позволяющее увеличивать и уменьшать скорость мотора с помощью двух кнопок: каждое нажатие кнопки увеличивает (уменьшает) скорость на 10%.
Предоставьте общий доступ к своим виртуальным устройствам и отправьте ссылки на решения с помощью формы.